Overview
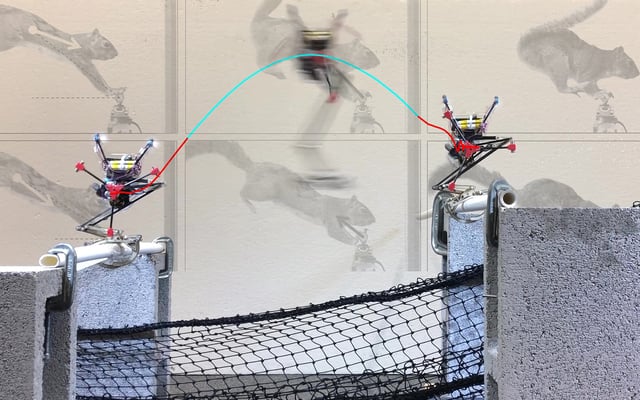
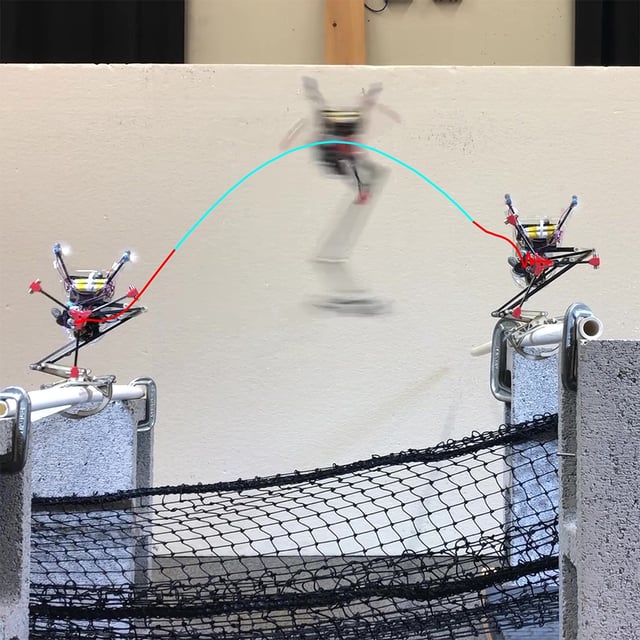
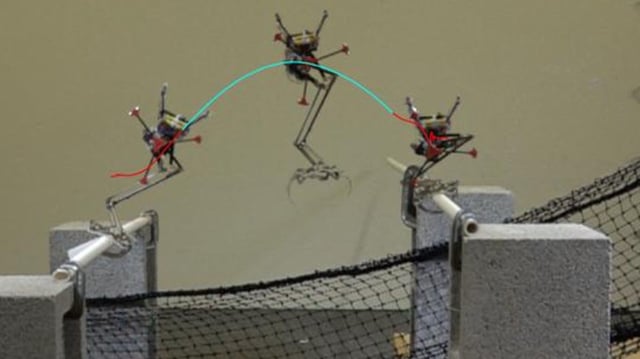
- Salto, a one-legged robot inspired by squirrel movements, can leap between narrow surfaces and attempt upright landings.
- The robot uses a novel strategy of modulating radial forces to control its balance during landings, mimicking how squirrels stabilize themselves.
- Equipped with a claw-like gripper and posture adjustment capabilities, Salto landed on narrow surfaces in 25 out of 30 trials but achieved upright balance in only two instances.
- The research, published in Science Robotics, highlights potential applications for agile robots in construction, environmental monitoring, and disaster relief.
- Future improvements to Salto’s gripper and balance control mechanisms are needed to enhance its performance and reliability.