Overview
- OpenExo is the first comprehensive open-source exoskeleton framework, developed by NAU’s Biomechatronic Lab under associate professor Zach Lerner.
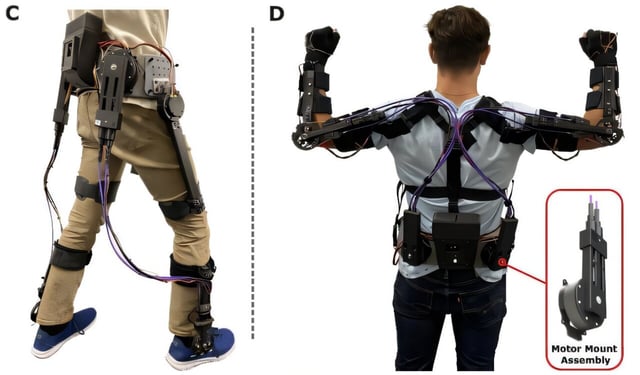
- The framework, published in Science Robotics and available online, includes design files, code and step-by-step guides for building single- or multi-joint devices.
- Early trials helped children with cerebral palsy and patients with gait disorders improve their mobility.
- By lowering development costs from tens of thousands of dollars, the toolkit aims to spur innovation in university labs, clinics and low-resource settings.
- The project has already attracted grant funding, generated patents and launched a spin-off that commercializes a robotic ankle device.