

Overview
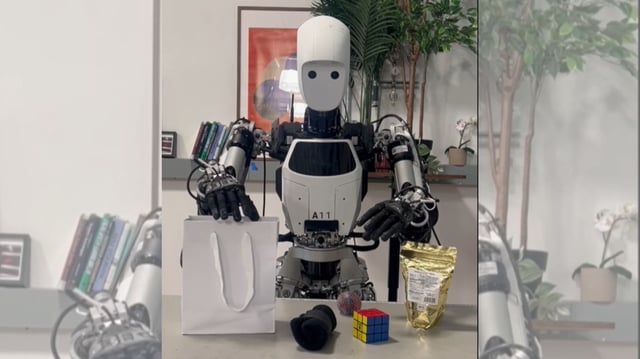
- Gemini Robotics On-Device runs entirely on robots without internet access, enabling low-latency inference for tasks such as unzipping bags and folding laundry.
- Optimized for bi-arm platforms, the model requires minimal computational resources and delivers near cloud-level performance in Google’s internal benchmarks.
- It adapts to new tasks with as few as 50 to 100 demonstrations and has been ported from Google’s ALOHA robot to the Franka FR3 and Apptronik’s Apollo humanoid.
- Developers can fine-tune the model using a Gemini Robotics SDK available through Google’s trusted tester program.
- Unlike its hybrid predecessor, the on-device version omits built-in semantic safety reasoning, prompting developers to implement their own safety controls.