

Overview
- Developed by Durham researchers, T-STAR enables each quadrotor to share data and adjust its trajectory in real time to avoid collisions and hold formation.
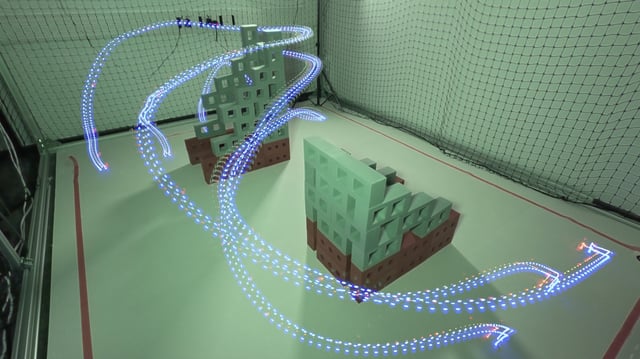
- T-STAR combines model predictive contour control with virtual-force flocking to compute time‑optimal routes around obstacles.
- Simulations and laboratory experiments found the approach completed missions more quickly with more reliable flight paths than current methods.
- The team plans larger outdoor trials to evaluate performance outside the lab, with no real-world deployments reported yet.
- Envisioned applications include search and rescue, disaster response, wildfire monitoring, logistics and agriculture, alongside related efforts in industry and defense.