
Overview
- The Amphibious Robotic Dog combines canine-inspired gaits with advanced engineering to overcome traditional amphibious robot limitations.
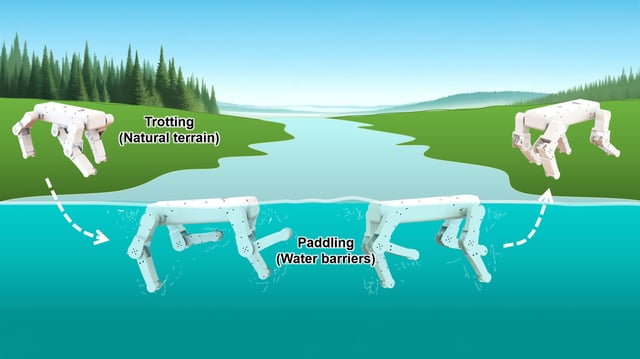
- Three paddling gaits were developed: two optimized for speed and propulsion, and one designed for stability in turbulent water.
- The robot achieved a top water speed of 0.576 kph and a land speed of 1.26 kph during testing, showcasing its versatile mobility.
- Bioinspired trajectory planning and a double-joint leg structure enable greater agility, dynamics, and payload capacity than previous designs.
- Potential applications include environmental research, military operations, and rescue missions, with findings published in Bioinspiration & Biomimetics.